Các giải pháp
Solutions
Nếu cần hỗ trợ, bạn có thể liên lạc với chúng tôi qua
Trung tâm hỗ trợ 24/7
(+84) 919 247 843
diep.ns@pnctech.vn
Contact us for consultation
24/7 Support Center
(+84) 919 247 843
diep.ns@pnctech.vn
Các giải pháp
Handling Robot
Typically mounted on a stable base, pick-and-place robots are positioned to access different areas for performing tasks. These robots utilize Machine Vision systems to identify, grasp, and transport objects from one location to another. With various available design options, pick-and-place robots can be configured with different end-effector tooling options for use in various applications such as assembly, packaging, or material handling from bins.
The key benefits of pick-and-place robots are speed and consistency. Robots can be customized to meet specific production requirements, and they can be easily programmed for use in multiple applications. Despite their different designs, pick-and-place robots are typically compact and lightweight, making them ideal for applications with limited space.
Pick-and-place robots have specialized components, including:
Robotic Arm: The robotic arm, also known as the manipulator, is an extension of the robot that uses cylindrical or spherical jointed parts to provide movement and articulation.
End Effector: The end effector is the accessory at the end of the robotic arm that performs the necessary tasks, such as gripping objects. End effectors can be designed to fulfill different functions based on requirements.
Drive System: The drive system generates motion in the robot arm and the end effector. Drive systems can include various types of motors, such as servo motors, stepper motors, or hydraulic cylinders.
Sensors: Sensors can be considered as the robot’s eyes. They play a role in determining the position of objects and provide feedback for the robot’s actions.
Controller: The controller synchronizes and controls the motion of different drive systems in the robot, acting as the brain behind the smooth operation of the robot.
Hình ảnh sản phẩm
Product Images
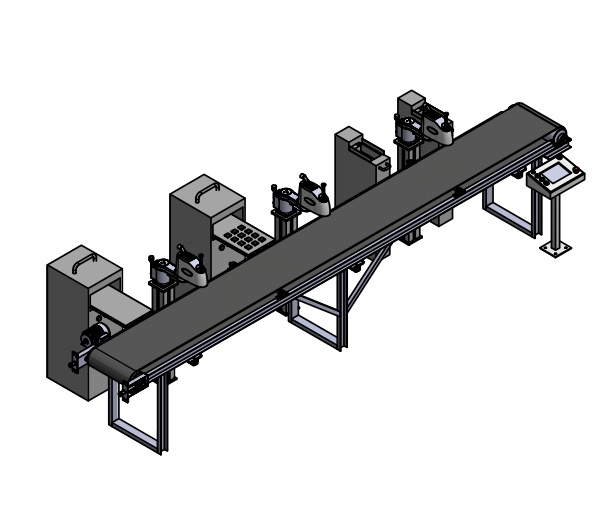
Mô tả giải pháp
Solution Description
- Diễn giải phần cứng
- Diễn giải phần mềm
- Diễn giải phụ kiện
There are various types of pick-and-place robots, such as:
Cartesian Robots:
Cartesian robots move objects in multiple planes, using X, Y, and Z coordinates (referred to as Cartesian coordinates).
High-Speed Pick-and-Place Robots:
High-speed pick-and-place robots retrieve items at very high speeds, which is why they are used in applications with large volumes. These robots can handle around 300 items per hour.
Robotic Arm:
Robotic arms are the simplest and most common type of pick-and-place robots. As described earlier, they can be 5-axis or 6-axis robot arms. 6-axis robot arms operate similarly to Cartesian robots but with lower positional accuracy compared to delta robots.
Delta Robots:Delta robots can pick items and place them in predefined patterns or assembly groups. These robots can be equipped with sensors or vision systems to select items based on different colors or sizes.
Collaborative Robots (Cobots):
Collaborative robots are named so because they work collaboratively with humans. These robots can optimize their paths to minimize transportation time.
Năng lực của chúng tôi
Our Capacity
Quy trình làm việc của PNC Tech
Tư vấn giải pháp
Triển khai và cài đặt
Bảo hành và bảo dưỡng
PNC Tech Execution Process
Consultation
Execution and Installation
Support and Warranty
Nhà cung cấp nổi bật
Standout Provider


Yêu cầu tư vấn
Consultation Request
Nếu cần hỗ trợ, bạn có thể liên lạc với chúng tôi qua
Trung tâm hỗ trợ 24/7