
Các giải pháp
Nếu cần hỗ trợ, bạn có thể liên lạc với chúng tôi qua
Trung tâm hỗ trợ 24/7
(+84) 919 247 843
diep.ns@pnctech.vn
Các giải pháp
Menu
Robot Pick n Place
Các Robot sử dụng các hệ thống Machine Vision để xác định, nắm bắt và di chuyển đồ vật từ nơi này sang nơi khác. Với nhiều tùy chọn thiết kế có sẵn, rô-bốt gắp và đặt có thể được cấu hình với nhiều tùy chọn công cụ cuối cánh tay khác nhau để sử dụng trong các ứng dụng khác nhau, chẳng hạn như lắp ráp, đóng gói hoặc nhặt nguyên liệu từ thùng.
Thường được gắn trên một giá đỡ ổn định, robot gắp và đặt được định vị để tiếp cận các khu vực khác nhau để thực hiện công việc. Các Robot sử dụng các hệ thống Machine Vision để xác định, nắm bắt và di chuyển đồ vật từ nơi này sang nơi khác. Với nhiều tùy chọn thiết kế có sẵn, rô-bốt gắp và đặt có thể được cấu hình với nhiều tùy chọn công cụ cuối cánh tay khác nhau để sử dụng trong các ứng dụng khác nhau, chẳng hạn như lắp ráp, đóng gói hoặc nhặt nguyên liệu từ thùng.
Lợi ích chính của robot chọn và đặt là tốc độ và tính nhất quán. Rô-bốt có thể được tùy chỉnh để đáp ứng các yêu cầu sản xuất cụ thể và chúng có thể dễ dàng lập trình để có thể sử dụng cho nhiều ứng dụng. Mặc dù các thiết kế khác nhau, rô bốt gắp và đặt thường có kích thước nhỏ và trọng lượng nhẹ, khiến chúng trở nên lý tưởng để sử dụng trong các ứng dụng có không gian hạn chế.
Robot chọn và đặt có một số bộ phận chuyên dụng, chẳng hạn như:
Công cụ Cánh tay rô bốt: Cánh tay rô bốt, còn được gọi là bộ điều khiển, là phần mở rộng của rô bốt bằng cách sử dụng các bộ phận hình trụ hoặc hình cầu. liên kết, khớp nối.
Bộ hiệu ứng cuối: Bộ hiệu ứng cuối là phụ kiện ở cuối cánh tay rô-bốt, thực hiện công việc cần thiết chẳng hạn như kẹp các vật thể. Các bộ hiệu ứng cuối có thể được thiết kế để thực hiện các chức năng khác nhau dựa trên các yêu cầu.
Bộ truyền động: Bộ truyền động tạo ra chuyển động trong cánh tay robot và bộ truyền động cuối. Các bộ truyền động tuyến tính về cơ bản là bất kỳ loại động cơ nào, chẳng hạn như động cơ servo, động cơ bước hoặc xi lanh thủy lực.
Cảm biến: Bạn có thể coi cảm biến là con mắt của rô-bốt. Các cảm biến làm nhiệm vụ như xác định vị trí của đối tượng.
Bộ điều khiển: Bộ điều khiển đồng bộ hóa và điều khiển chuyển động của các bộ truyền động khác nhau của rô bốt, do đó là bộ não đằng sau hoạt động trơn tru của rô bốt.
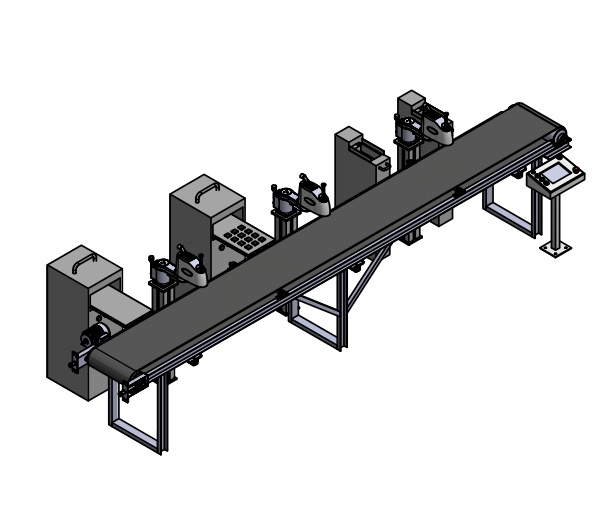
Hình ảnh sản phẩm
Mô tả giải pháp
- Diễn giải phần cứng
- Diễn giải phần mềm
- Diễn giải phụ kiện
Có nhiều loại rô-bốt chọn và đặt khác nhau, chẳng hạn như:
Robot Cartesian:
Robot Descartes di chuyển các vật phẩm trong nhiều mặt phẳng, sử dụng tọa độ X, Y và Z (được gọi là tọa độ Descartes).
Rô bốt chọn nhanh:
Rô-bốt chọn nhanh lấy đồ ở tốc độ rất cao, đó là lý do tại sao chúng được sử dụng trong các ứng dụng có khối lượng lớn. Những robot này có khả năng di chuyển khoảng 300 món đồ mỗi giờ.
Cánh tay robot:
Cánh tay rô-bốt là loại rô-bốt chọn và đặt đơn giản nhất và phổ biến nhất. Như đã mô tả trước đó, chúng được sử dụng làm cánh tay robot 5 trục và 6 trục. Cánh tay robot 6 trục hoạt động tương tự như robot cartesian nhưng có độ chính xác định vị thấp hơn so với robot delta.
Robot Delta:
Robot Delta có thể chọn các vật phẩm và đặt chúng vào các mẫu hoặc nhóm lắp ráp được xác định trước. Những robot này có thể được trang bị cảm biến hoặc hệ thống thị giác để chọn các mặt hàng dựa trên màu sắc hoặc kích cỡ khác nhau.
Robot cộng tác (Cobot):
Robot cộng tác được đặt tên như vậy bởi vì chúng làm việc cộng tác với con người. Những robot này có thể tạo lộ trình tối ưu để giảm thiểu thời gian vận chuyển.
Ứng dụng lắp ráp:
Trong quy trình lắp ráp, rô-bốt gắp có thể thu thập nhiều bộ phận từ nhiều vị trí và lắp ráp chúng tại một nơi. Công việc phức tạp trong môi trường điện tử được thực hiện bằng cách sử dụng các loại robot gắp này.
Trong quy trình lắp ráp, rô-bốt gắp có thể thu thập nhiều bộ phận từ nhiều vị trí và lắp ráp chúng tại một nơi. Công việc phức tạp trong môi trường điện tử được thực hiện bằng cách sử dụng các loại robot gắp này.
Đóng gói – rô-bốt gắp được sử dụng trong quá trình đóng gói, lấy các mặt hàng từ nguồn đến hoặc khu vực được chỉ định và đặt các mặt hàng đó vào thùng đóng gói.
Bin Picking – Rô bốt gắp được sử dụng trong các ứng dụng chọn thùng lấy các bộ phận hoặc vật phẩm từ thùng. Những robot gắp này thường có hệ thống thị giác tiên tiến cho phép chúng phân biệt màu sắc, hình dạng và kích thước để chọn đúng món đồ ngay cả từ các thùng chứa các món đồ được trộn ngẫu nhiên.
Kiểm tra – Rô bốt gắp được sử dụng cho các ứng dụng kiểm tra được trang bị hệ thống Machine Vision hiện đại để nhặt đồ vật, phát hiện sự bất thường và loại bỏ các bộ phận hoặc vật phẩm bị lỗi bằng cách đặt chúng vào vị trí được chỉ định.
Năng lực của chúng tôi
Quy trình làm việc của PNC Tech
Tư vấn giải pháp
Triển khai và cài đặt
Bảo hành và bảo dưỡng
Nhà cung cấp nổi bật

Yêu cầu tư vấn
Nếu cần hỗ trợ, bạn có thể liên lạc với chúng tôi qua
Trung tâm hỗ trợ 24/7